3D shape segmentation is a fundamental computer vision task that partitions the object into labeled semantic
parts. Recent approaches to 3D shape segmentation learning heavily rely on high-quality labeled training datasets.
This limits their use in applications to handle the large scale
unannotated datasets. In this paper, we proposed a novel
semi-supervised approach, named Robust Learning of OneShot 3D Shape Segmentation (ROSS), which only requires
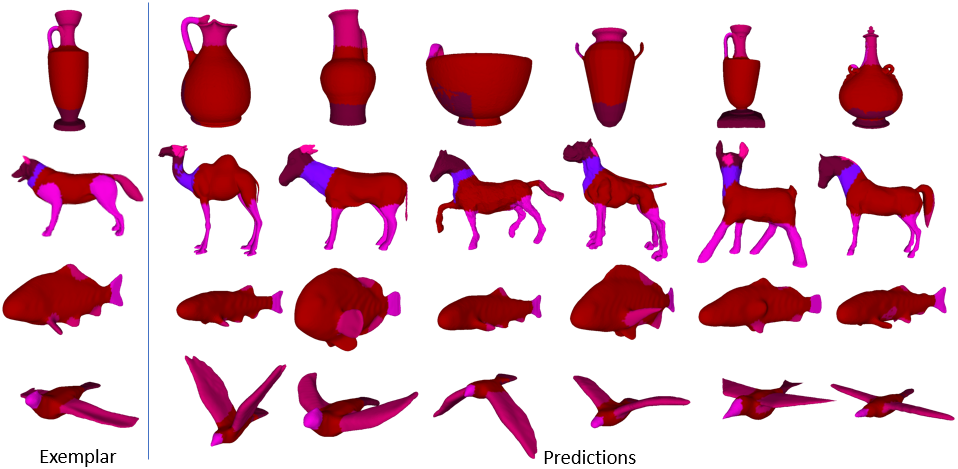
one single exemplar labeled shape for training. The proposed ROSS can generalize its ability from a one-shot training process to
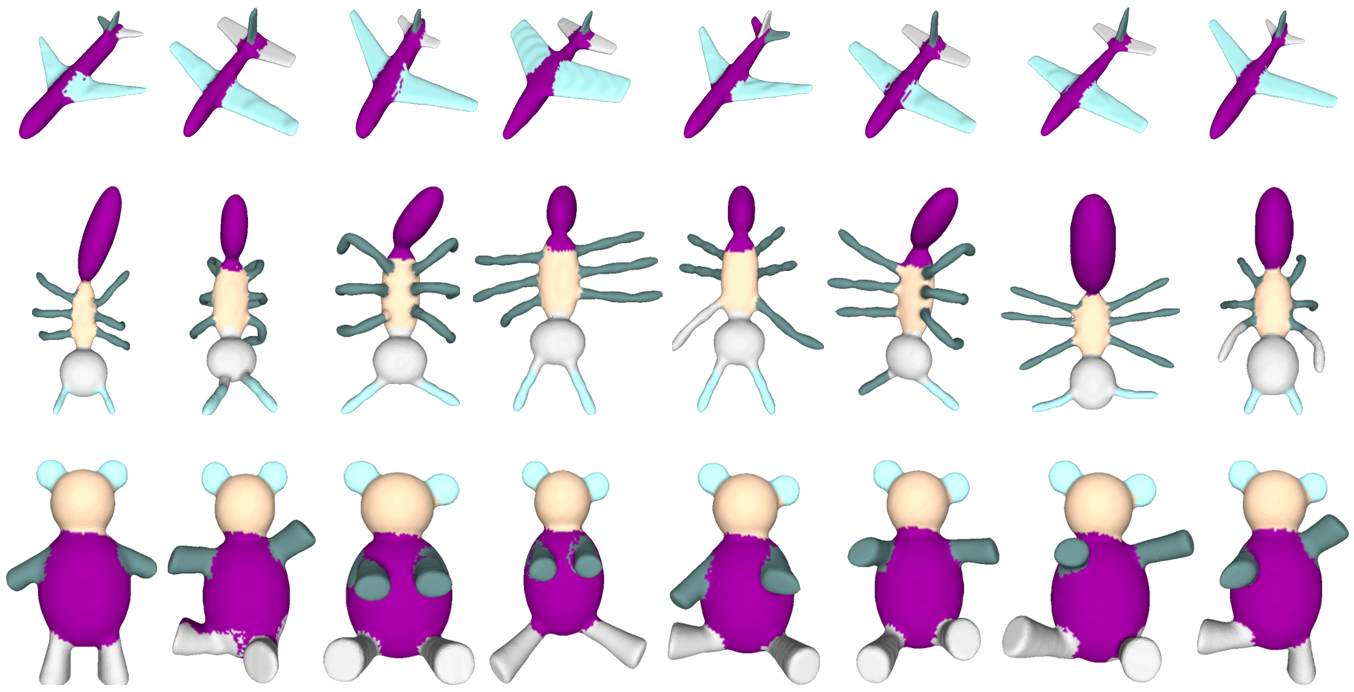
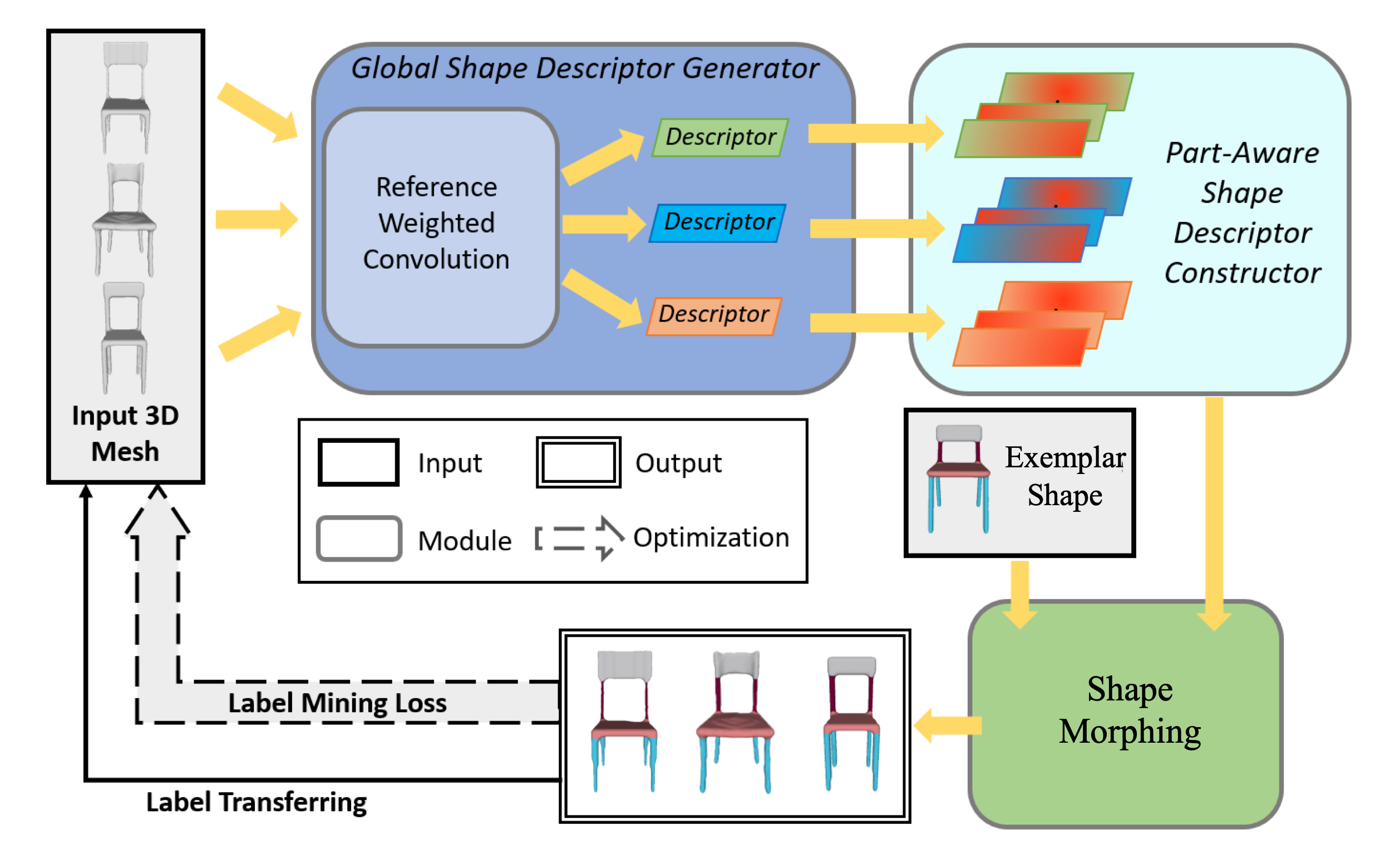
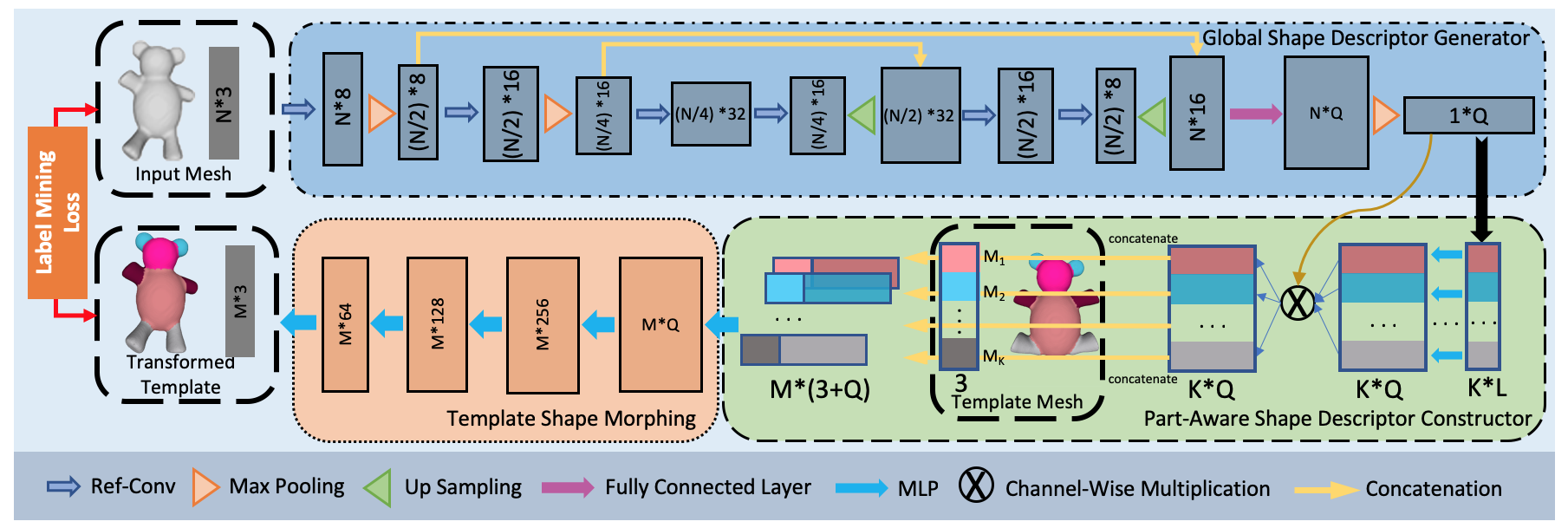
predict the segmentation for previously unseen 3D shape models. The proposed ROSS is composed of
three major modules for 3D shape segmentation as follows.
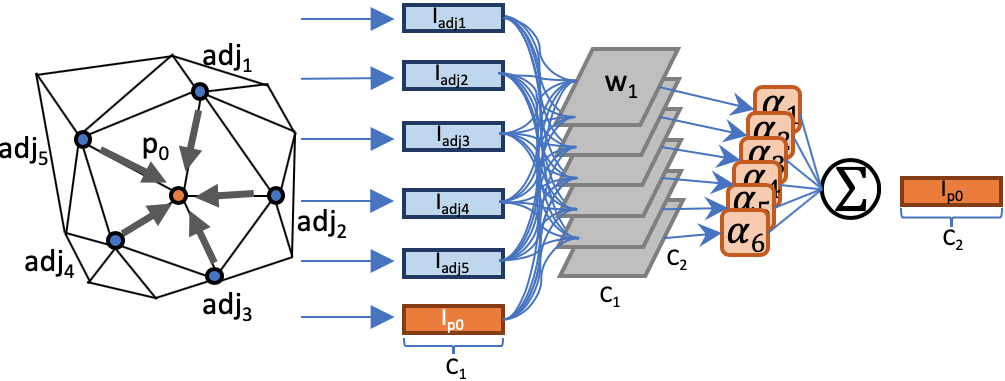
The global shape descriptor generator is the first module
that utilizes the proposed reference weighted convolution
to learn a 3D shape descriptor. The second module is a
part-aware shape descriptor constructor that can generate
weighted descriptors from a learned 3D shape descriptor
according to semantic parts without supervision. The shape
morphing with label transferring works as the last module.
It morphs the exemplar shape and then transfers labels from
the transformed exemplar shape to the target shape. The
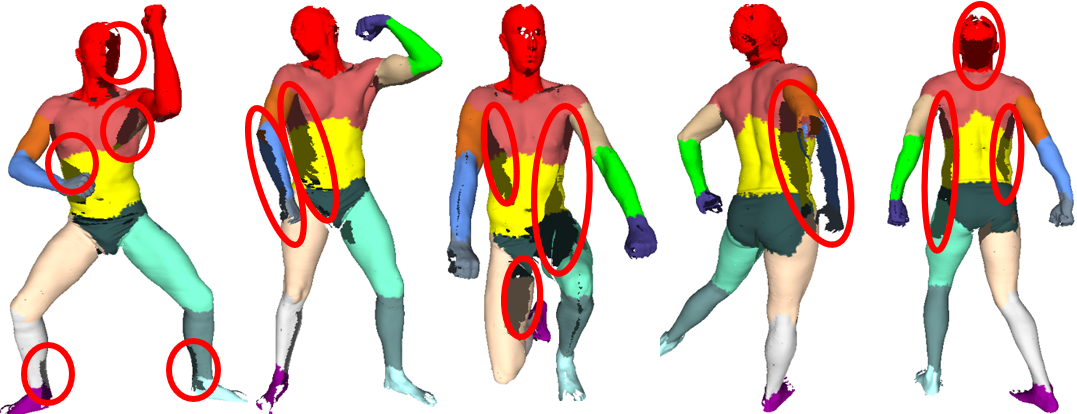
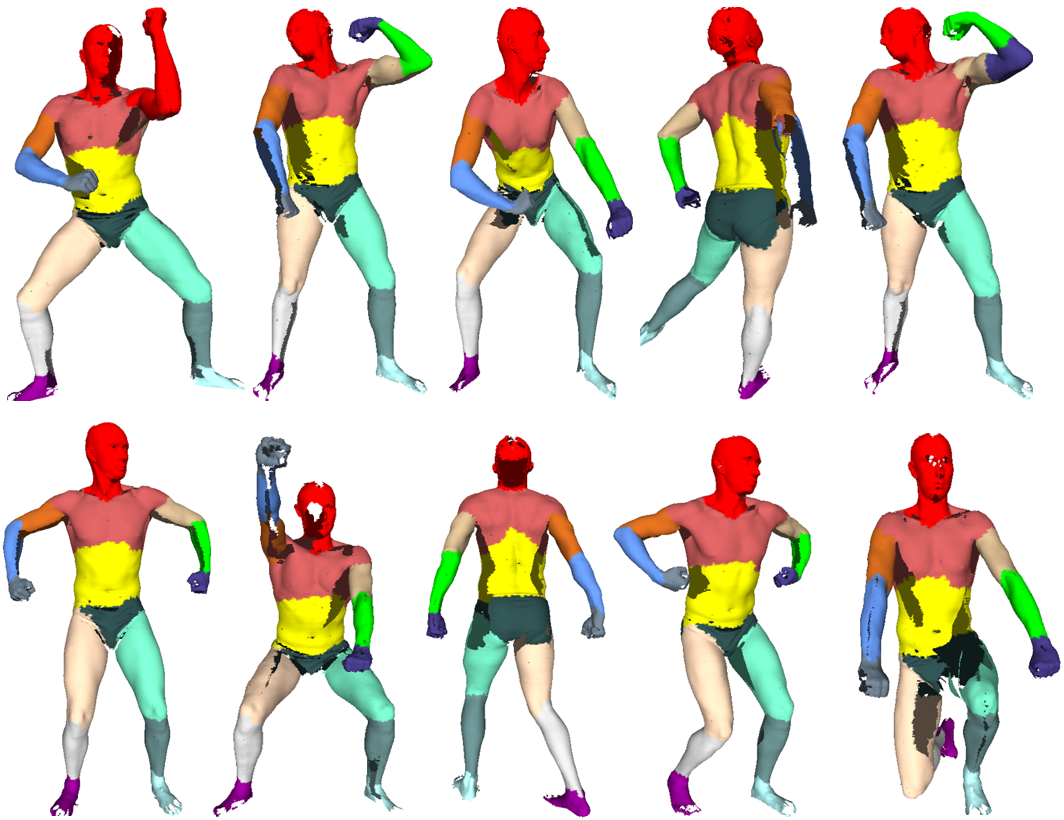
extensive experimental results on 3D mesh datasets demonstrate the ROSS is robust to noise and incomplete shapes
and it can be applied to unannotated datasets. The experiment shows the proposed ROSS can achieve comparable
performance with the supervised method.
|